Stepper motor
Ideal for 3D printers, CNC machines, or any other machine that requires reliable, high torque, incremental movement.
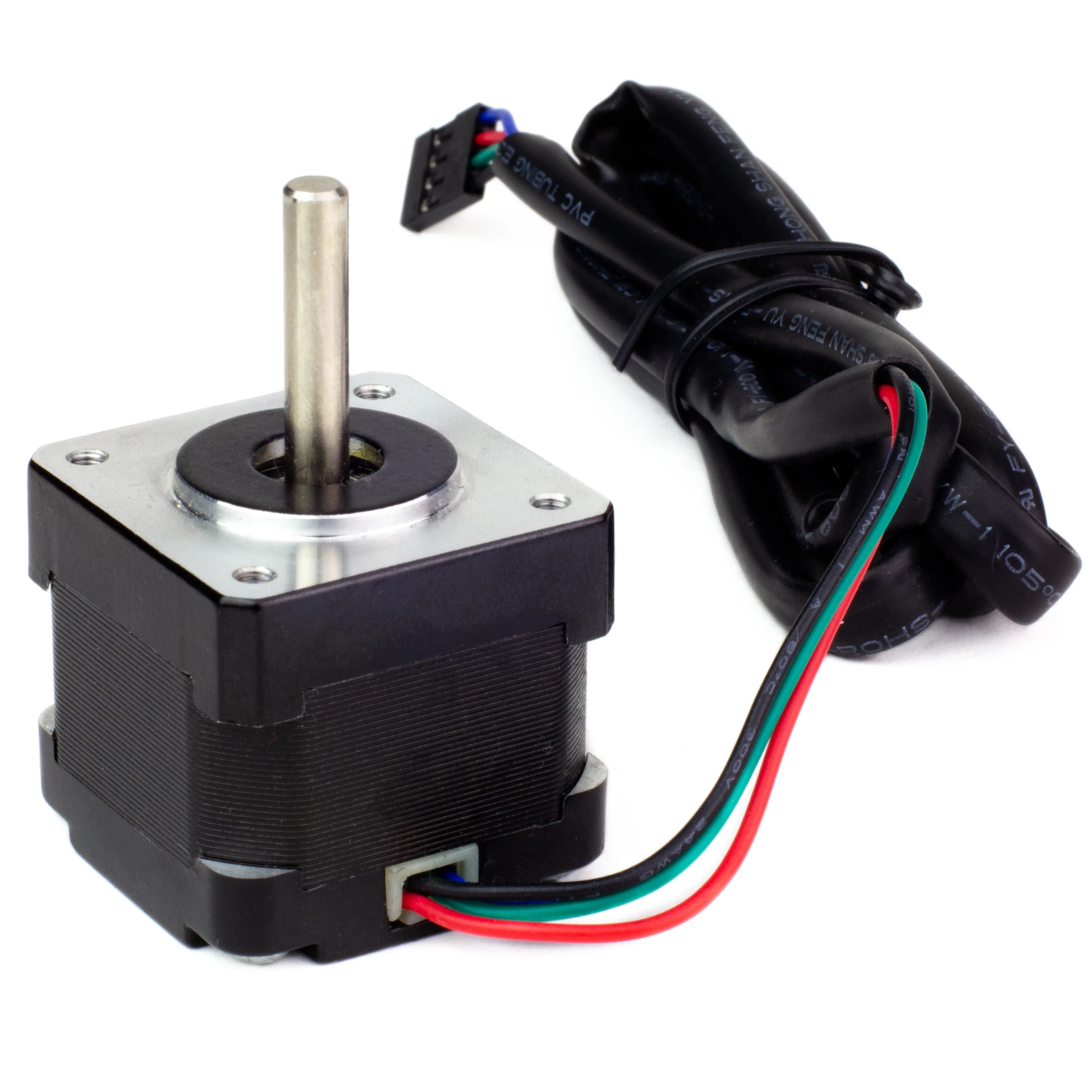
The three sizes of NEMA stepper motors here—NEMA 14, 17, and 23—refer to the size of the motor and hence the amount of torque that the motor is capable of; the larger the motor, the more torque (specific torque values are in the tables below).
Please note: while the NEMA 14 and 17 come with detachable cables terminating in female headers, the cable on the NEMA 23 is non-detachable and terminates in bare wires.
Specifications
| NEMA 14 (35mm) | NEMA 17 (42mm) | NEMA 23 (57mm) | |
|---|---|---|---|
| Step angle | 1.8° | ||
| Step angle accuracy | 1.8°±5% (full step, no load) | ||
| Resistance accuracy | ±10% | ||
| Inductance accuracy | ±20% | ||
| Temperature rise | 80°C Max. (2 phase on) | ||
| Ambient temperature | -20°C~+50°C | ||
| Insulation resistance | 100MΩ Min. , 500VDC | ||
| Shaft radial play | 0.02 Max. (450 g-load) | ||
| Shaft axial play | 0.08 Max. (450 g-load) | ||
| Max. radial force | 28N (20mm from the flange) | 75N (20mm from the flange) | |
| Max. axial force | 10N | 15N | |
| Rated current (Amps/phase) | 1.00 | 1.68 | 2.8 |
| Holding torque (oz.in) | 25.0 | 62 | 175.0 |
| Holding torque (kg.cm) | 1.8 | 4.4 | 12.6 |
| Resistance (Ohms/phase) | 2.7 | 1.65 | 0.90 |
| Inductance (mH/phase) | 4.0 | 3.6 | 2.5 |
| Inertia (g.cm2) | 14 | 54 | 300 |
| Detent torque (g.cm) | 100 | 150 | 400 |
| Weight (kg) | 0.18 | 0.28 | 0.72 |
| Dimensional drawing | link | link | link |
| Torque curve diagram |
link | link | link |
Wiring
For the NEMA 14 and 17 stepper motors, the red (+) and blue (-) wires control bipolar driver A and the green (+) and black (-) bipolar driver B.
For the NEMA 23 stepper motor, the red (+) and green (-) wires control bipolar driver A and the yellow (+) and blue (-) wires control bipolar driver B.
Product Information
Product Information
Shipping & Returns
Shipping & Returns



Stepper motor
Stepper motor
Ideal for 3D printers, CNC machines, or any other machine that requires reliable, high torque, incremental movement.
The three sizes of NEMA stepper motors here—NEMA 14, 17, and 23—refer to the size of the motor and hence the amount of torque that the motor is capable of; the larger the motor, the more torque (specific torque values are in the tables below).
Please note: while the NEMA 14 and 17 come with detachable cables terminating in female headers, the cable on the NEMA 23 is non-detachable and terminates in bare wires.
Specifications
| NEMA 14 (35mm) | NEMA 17 (42mm) | NEMA 23 (57mm) | |
|---|---|---|---|
| Step angle | 1.8° | ||
| Step angle accuracy | 1.8°±5% (full step, no load) | ||
| Resistance accuracy | ±10% | ||
| Inductance accuracy | ±20% | ||
| Temperature rise | 80°C Max. (2 phase on) | ||
| Ambient temperature | -20°C~+50°C | ||
| Insulation resistance | 100MΩ Min. , 500VDC | ||
| Shaft radial play | 0.02 Max. (450 g-load) | ||
| Shaft axial play | 0.08 Max. (450 g-load) | ||
| Max. radial force | 28N (20mm from the flange) | 75N (20mm from the flange) | |
| Max. axial force | 10N | 15N | |
| Rated current (Amps/phase) | 1.00 | 1.68 | 2.8 |
| Holding torque (oz.in) | 25.0 | 62 | 175.0 |
| Holding torque (kg.cm) | 1.8 | 4.4 | 12.6 |
| Resistance (Ohms/phase) | 2.7 | 1.65 | 0.90 |
| Inductance (mH/phase) | 4.0 | 3.6 | 2.5 |
| Inertia (g.cm2) | 14 | 54 | 300 |
| Detent torque (g.cm) | 100 | 150 | 400 |
| Weight (kg) | 0.18 | 0.28 | 0.72 |
| Dimensional drawing | link | link | link |
| Torque curve diagram |
link | link | link |
Wiring
For the NEMA 14 and 17 stepper motors, the red (+) and blue (-) wires control bipolar driver A and the green (+) and black (-) bipolar driver B.
For the NEMA 23 stepper motor, the red (+) and green (-) wires control bipolar driver A and the yellow (+) and blue (-) wires control bipolar driver B.
Original: $13.34
-65%$13.34
$4.67Product Information
Product Information
Shipping & Returns
Shipping & Returns
Description
Ideal for 3D printers, CNC machines, or any other machine that requires reliable, high torque, incremental movement.
The three sizes of NEMA stepper motors here—NEMA 14, 17, and 23—refer to the size of the motor and hence the amount of torque that the motor is capable of; the larger the motor, the more torque (specific torque values are in the tables below).
Please note: while the NEMA 14 and 17 come with detachable cables terminating in female headers, the cable on the NEMA 23 is non-detachable and terminates in bare wires.
Specifications
| NEMA 14 (35mm) | NEMA 17 (42mm) | NEMA 23 (57mm) | |
|---|---|---|---|
| Step angle | 1.8° | ||
| Step angle accuracy | 1.8°±5% (full step, no load) | ||
| Resistance accuracy | ±10% | ||
| Inductance accuracy | ±20% | ||
| Temperature rise | 80°C Max. (2 phase on) | ||
| Ambient temperature | -20°C~+50°C | ||
| Insulation resistance | 100MΩ Min. , 500VDC | ||
| Shaft radial play | 0.02 Max. (450 g-load) | ||
| Shaft axial play | 0.08 Max. (450 g-load) | ||
| Max. radial force | 28N (20mm from the flange) | 75N (20mm from the flange) | |
| Max. axial force | 10N | 15N | |
| Rated current (Amps/phase) | 1.00 | 1.68 | 2.8 |
| Holding torque (oz.in) | 25.0 | 62 | 175.0 |
| Holding torque (kg.cm) | 1.8 | 4.4 | 12.6 |
| Resistance (Ohms/phase) | 2.7 | 1.65 | 0.90 |
| Inductance (mH/phase) | 4.0 | 3.6 | 2.5 |
| Inertia (g.cm2) | 14 | 54 | 300 |
| Detent torque (g.cm) | 100 | 150 | 400 |
| Weight (kg) | 0.18 | 0.28 | 0.72 |
| Dimensional drawing | link | link | link |
| Torque curve diagram |
link | link | link |
Wiring
For the NEMA 14 and 17 stepper motors, the red (+) and blue (-) wires control bipolar driver A and the green (+) and black (-) bipolar driver B.
For the NEMA 23 stepper motor, the red (+) and green (-) wires control bipolar driver A and the yellow (+) and blue (-) wires control bipolar driver B.